Volvo Cars
Robotcell
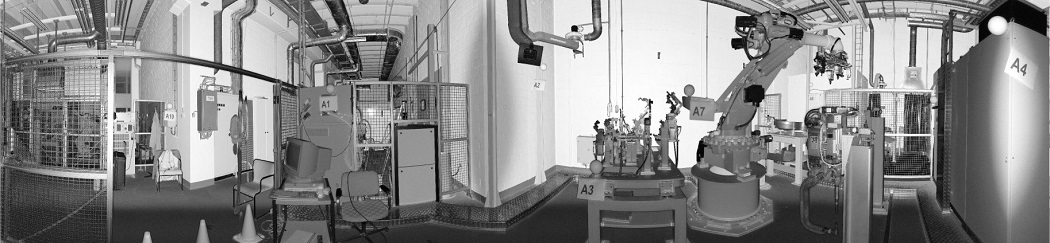
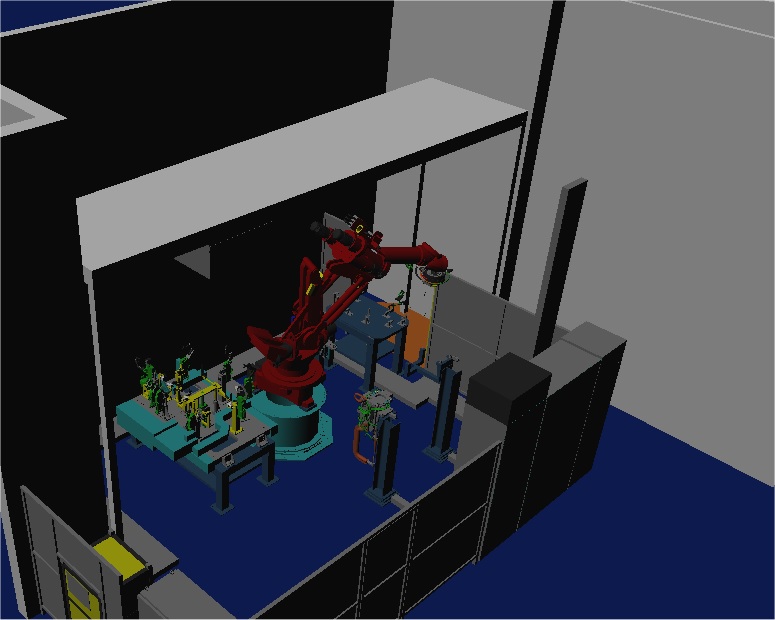
Robotcellen worden gekenmerkt door een hoge complexiteit en nauwkeurigheid. Robots worden veelal ‘off-line’ geprogrammeerd in bv. ROBCAD software om stilstand bij ombouw te minimaliseren. Om te controleren of het ROBCAD model een betrouwbare weergave van de werkelijkheid is hebben we 3D laser-scanning ingezet ter verificatie. De scans zijn gematched met de originele ROBCAD tekeningen om uit te vinden of de robotcel correct gebouwd was. Systematische controle leverde enkele substantiële verschillen die in het model moesten worden aangepast. Zodoende kan de ‘off-line programming’ in ROBCAD plaatsvinden gebaseerd op de werkelijke layout en afmetingen van de robotcel. Op deze wijze voorkomt 3D laser-scanning kostbare ‘collisions’ en verlies aan productietijd.